

Hva er en sonar og hvordan fungerer de?
Sonar er kort for Sound Navigation And Ranging. Undervannsonarer har blitt brukt i lang tid og du finner de i dag i de fleste marine industrier og bruksområder. Eksempler på bruk av sonarer er enkle ekkolodd ombord fiskebåter som brukes til å lokalisere fisk eller mer avanserte sonarer til bruk for navigering og lokalisering av fremmede fartøy.
De fleste sonarer kan forklares enkelt; du lager en lyd, eller en lydbølge, fra din posisjon og avhengig av hvor sterkt dette ekkoet kommer tilbake til din posisjon igjen så kan du avgjøre hvor langt unna du er lokalisert fra noe. For noen type sonarer kan en også bestemme hvor stor, tykk eller i hvilket materiale objekter rundt deg er i ettersom noen materialer reflekterer mer lyd enn andre.
Hva brukes undervannsonarer til?
Det er hovedsakelig 3 ulike områder for bruk av sonarer under vann:
- Samle inn data som kartlegging av havbunnen eller til bildegjenskapelse av objekter under vann
- Undervannsnavigasjon i farvann med lite sikt
- Lokalisere eller søke etter objekter eller savnede personer
Forskere bruker typisk sonarer til å kartlegge havbunnen. De samler data for å rådgi om hvordan vi best kan ivareta havet og alt som befinner seg under overflaten. ROVen er da ofte essensiell for å forstå dataen som samles inn fra sonaren ettersom ROVen filmer og gjengir ekte bilder.
Å navigere under vann er ganske ulikt fra det å navigere på bakkenivå. Havet kan være mørkt, ha dårlig sikt og er generelt et mer ukjent sted for mennesker. Ettersom sonarer kan forenkle navigasjon betraktelig, vil sonarer gjøre det enklere for ROV operatører å forstå hvor ROVen er lokalisert i forhold til andre objekter under vann.
Ettersom sonarer forenkler navigasjon er dette naturlig nok et svært nyttig verktøy for å lokalisere objekter eller savnede personer. Da sonarer reflekterer ekko fra objekter lokalisert langt forbi hva kameraet kan se, vil et slikt verktøy være til stor hjelp for søk- og redningsteam.

To hovedkategorier for sonarer: aktiv og passiv
Sonarer plasseres gjerne i kategorien aktiv eller passiv. Passive sonarer lytter etter signaler fra marine objekter slik som skip eller dyr. Denne typen sonarer er populære blant militære skip og blant forskere som "lytter til havet". Aktive sonarer sender ut et akustisk signal og lytter deretter etter et ekko fra dette signalet. Det er denne typen sonarer som brukes med ROVer ettersom de kan gi dybdeinformasjon, gjengi bilder av objekter og bidra i navigasjon.
Aktive sonar systemer: Single- versus Multi-beam
I følge forfatterne av boken The ROV Manual (Christ og Werli, 2007, s. 401) faller aktive sonar systemer som brukes med ROVer ofte inn under disse tre kategoriene:
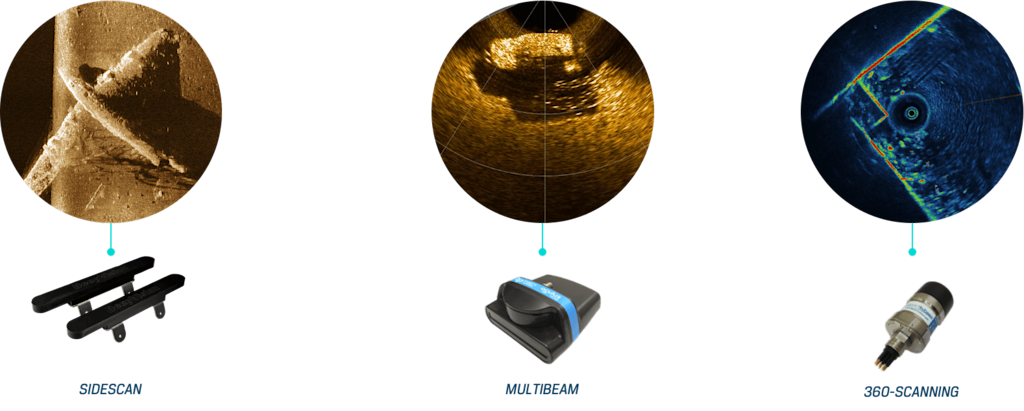
- Multibeam
- Mekanisk- eller side-scanning sonar (single-beam)
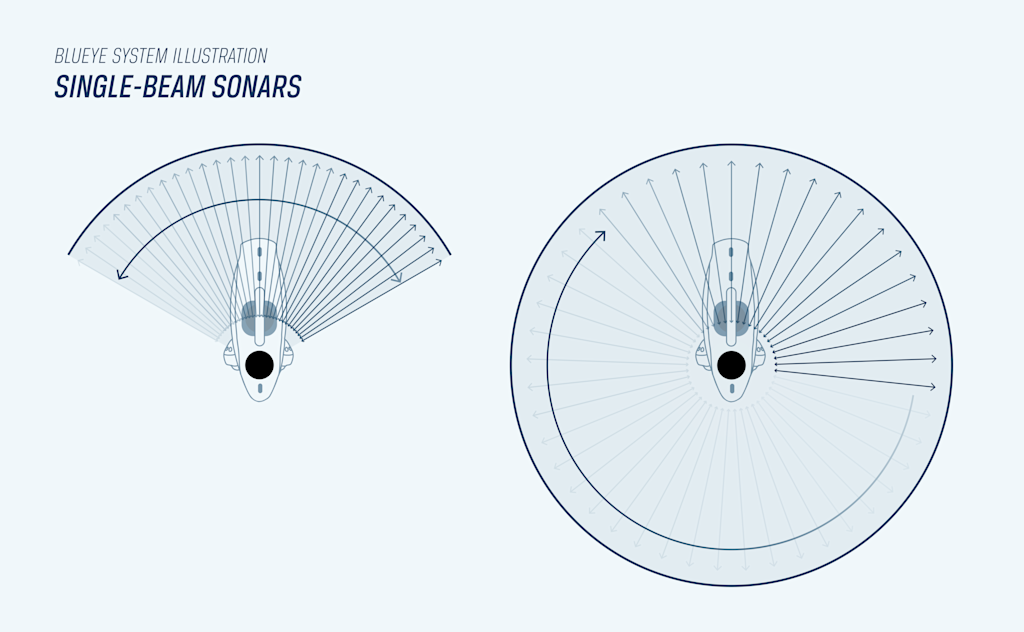
- Single-beam directional sonar
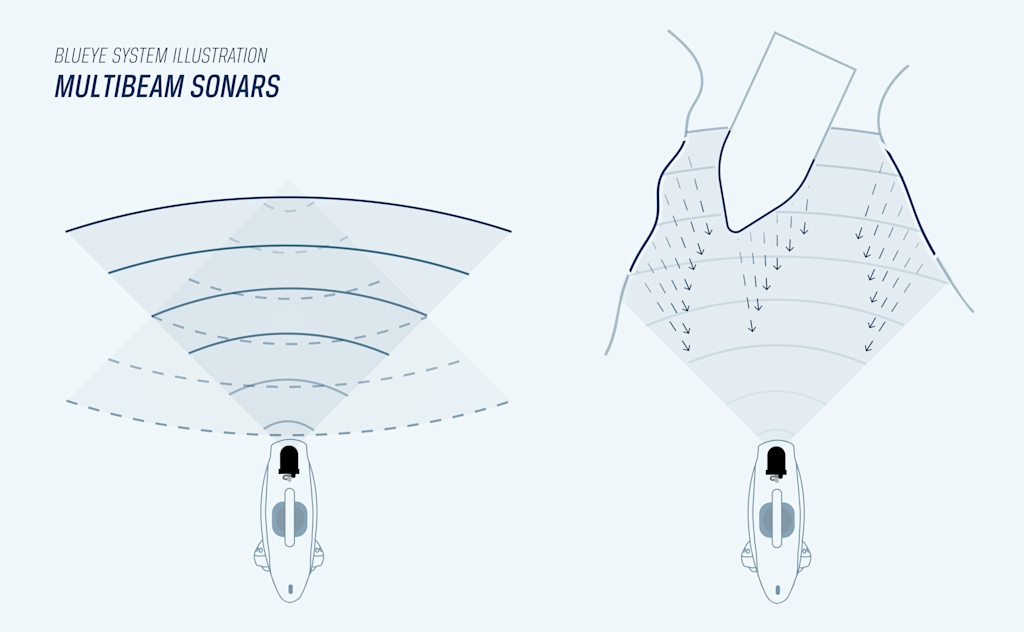
Single-beam sonarer bruker en puls med en mottaker på et enkelt mottakende element. Disse systmene er populære på markedet i dag på grunn av sin enkelthet, lave kostnad og er spesielt brukervennlig for å kartlegge større områder på sjøbunnen. På den andre siden sender en multibeam ut en bred puls i en vifte-form og mottar ekkoene på et mye større antall elementer på et mer detaljert nivå som sørger for rask gjengivelse av elementene. En multibeam samler inn data både på dybde og ekko. Denne typen sonar er spesielt brukt i situasjoner hvor det er viktig med et detaljert bilde som mulig på objekter og benyttes mye som et navigasjonsvertøy.
| Single-beam | Multibeam | |
|---|---|---|
| 360° visning rundt ROVen | Ja | - |
| Strømbehov | Lite | Mye |
| Bildegjengivelse | Standard | Premium |
| Pris |
Forskjellen mellom imaging- og -profiling sonar systemer
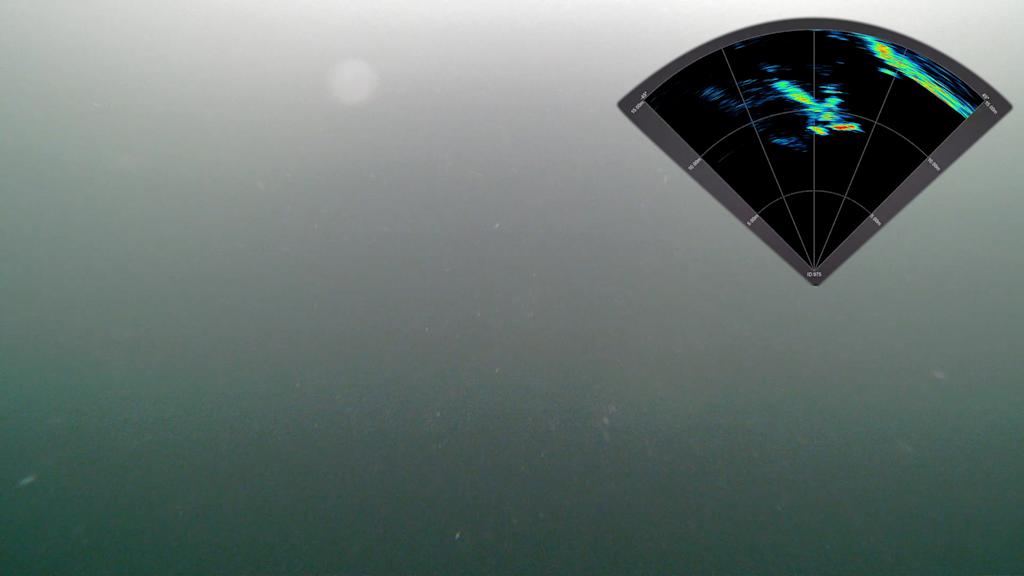
Imaging sonarer har en vifte-formet sonar stråle som scanner et gitt område ved enten å rotere eller bevege seg i en rett linje. En ROV operatør som benytter en imaging sonar har mulighet til å se størrelser, former, og overflater som reflekterer ulike karakteristika ved objektet. Hovedformålet ved å bruke en imaging sonar er rett og slett for å se mer (Christ og Wernli Sr, 2007, s. 404).
Profiling sonarer bruker en smal blyant-formet sonar stråle til å scanne på tvers av et gitt område og genererer en enkelt profillinje på monitoren. Denne linjen betår av flere tusen punkter og beskriver presist de kryss-seksjonene på et utvalgt område (Christ og Wernli Sr, 2007, s. 405). Det primære bruksområdet for profileringssonarer er ofte til å måle dybde eller for å gjenskape et bilde av sjøbunnen. En kan benytte både en imaging- og en profileringssonar på en ROV for å oppnå både bildegjengivelse og måle avstand fra havbunnen.
Hvilken type sonar bør jeg velge?
Det er en del faktorer en bør ta i betraktning når en skal velge en sonar for en ROV. Det er viktig å ta hensyn til bruksområde, budsjett og erfaring med denne typen verktøy. De ulike sonar-modellene kan sammenlignes med ulikhetene du opplever ved valg av kamera. Enkel kamerateknologi kan være svært kostnadseffektiv og intuitiv å operere, og mer avansert teknologi krever ofte en høyere investering i form av budsjett og kunnskap.
Å ta et bilde med et kamera er enkelt, men det er ikke alltid enkelt å få tatt akkurat det bildet du så for deg. Speilreflekskamera er mer komplekse, men med riktig trening kan du ta fantastiske motiver. Barrieren til å utnytte et systems fulle potensial kan være høy og i mange situasjoner kreves det en god del kunnskap om bruken. Dette er også viktig å ta hensyn til når en velger en sonar til en ROV.
Før du velger et sonar system er det viktig å evaluere bruksområdet ditt. Dersom du trenger en sonar til å kartlegge et større område, til å lokalisere et objekt eller gjøre bunnkartlegging, kan en 360-grader sonar være det beste alternativet. Har du behov for å se detaljer og eller navigere in-real-time, kan en multibeam være best.
Listen over sonarer er lang. De er ulik i pris og teknologien spenner fra å være enkel til nokså kompleks. Vi i Blueye tar gjerne en prat om ditt bruksområde for å veilede deg i de ulike verktøyene som finnes. Ta gjerne kontakt dersom du ønsker å lære mer om hvordan sonarer fungerer og hvordan de kan hjelpe deg i dine undervannsoperasjoner.

Bruksområder for sonarer på ROVer
- Lag 3D fotogrammetri av strukturer og inspiser integritet i detalj
- Geofysisk forskning
- Batymetri
- Bunnkartlegging
- Lokaliser objekter
- Øk den visuelle rekkevidden ved søk- og redningsoppdrag
- Enklere manøvrering og navigering av ROV i grumsete forhold
- Identifiser materialer
Tilgjengelige sonarer med Blueye X3 ROV
360 grader mekaniske sonarer
ISS360 Imaging Sonar fra Impact Subsea
ISS360 Imaging Sonar har en rekkevidde opp mot 90 meter og gir et veldig klart bilde av omgivelsene. Denne sonarer er svært kompakt og er ideell for både navigasjon og søk etter objekter.
Multibeam sonarer
Oculus M750d fra Blueprint Subsea
Oculus M750d er en tofrekvent multibeam utviklet for generell undervannsavbildning. Den opererer ved 750kHz og 1,2MHz og gir brukeren fleksibilitet til å skanne store områder med opptil 120 meters rekkevidde på lavere frekvens, eller oppnå svært detaljert bilde ved kortere rekkevidde på opptil 40 meter. Sonaren har et bredt horisontalt synsfelt på 130°, noe som gjør den ideell for hindringsunngåelse, navigasjon og situasjonsforståelse. Integrert tilt-kontroll via Blueye-appen gjør det mulig å styre strålen vertikalt mellom -30° og +30°, noe som forbedrer bruken i ulike undervannsscenarier.
Oculus M1200d fra Blueprint Subsea Optimalisert for høyoppløselige inspeksjoner, tilbyr M1200d tofrekvent drift ved 1,2MHz og 2,1MHz. Den leverer skarpe, detaljerte bilder på korte avstander, med maksimal rekkevidde på 40 meter ved lavere frekvens og 10 meter ved høyere frekvens. Sonarens horisontale strålebredde er henholdsvis 130° og 60°, og vertikal strålebredde er 20° og 12°, som gir en balansert kombinasjon av dekning og presisjon. Med støtte for tilt-kontroll via Blueye-appen er M1200d ideell for detaljerte inspeksjoner av strukturer, utstyr eller marint liv.
Oculus M3000d fra Blueprint Subsea Oculus M3000d er designet for ultrahøyoppløselige nærbildeinspeksjoner, og opererer ved 1,2MHz og 3,0MHz. Med maksimal rekkevidde på henholdsvis 30 meter og 5 meter, passer den godt for svært detaljerte inspeksjoner der presisjon er avgjørende. Den har 130° og 40° horisontalt synsfelt, samt en konstant vertikal åpning på 20°. Sanntidsbilde og høy oppløsning gjør det mulig å identifisere små detaljer og utføre nøyaktige undersøkelser i trange eller komplekse undervannsmiljøer. Integrert tilt-kontroll sikrer brukervennlighet og optimal dekning med ROV.
Oculus C550d fra Blueprint Subsea C550d er laget for oppdrag med lengre rekkevidde, og tilbyr tofrekvent drift ved 550kHz og 820kHz, med rekkevidde på opptil 100 meter og 30 meter. Den har bred horisontal åpning på 120° og 90°, samt 20° vertikalt synsfelt, noe som gjør den egnet for større områdeundersøkelser og deteksjon av større objekter eller strukturer. Som med de andre Oculus-modellene er tilt-kontroll tilgjengelig via Blueye-appen, som gir fleksibilitet i ulike survey-konfigurasjoner.
Oculus M370 fra Blueprint Subsea
Oculus M370s er en singelfrekvent multibeam-sonar utviklet for navigasjon og objektidentifisering under vann. Den opererer ved 375 kHz og har en rekkevidde på opptil 200 meter. Med bred horisontal åpning på 130° og 20° vertikalt synsfelt, egner den seg godt til oppdrag der overblikk og orientering er viktig. Dette gjelder for eksempel ved langdistanse navigasjon.
Sonarbilde vises direkte i Blueye-appen, hvor du også kan justere rekkevidde og følsomhet, måle objekter, ta bilder eller video og eksportere data. Justering av sonarens vinkel gjøres enkelt via appen, med tilt fra –30° til 30°, noe som gir fleksibilitet i ulike operasjoner.
Micron Gemini fra Tritech Micron Gemini fra Tritech er en av de minste multibeamene på markedet, spesialdesignet for kompakte ROV-er hvor plass og vekt er begrenset. Den har 90° horisontalt synsfelt, en maksimal rekkevidde på 50 meter og en oppdateringsrate på opptil 20Hz. Disse egenskapene gjør den velegnet for sanntidsavbildning i trange eller rotete miljøer. Med lavt strømforbruk og solid ytelse passer Micron Gemini godt til inspeksjon, navigasjon og objektdeteksjon der større sonarer ikke kan brukes.
Elektronisk skannende bildesonarer
Cerulean Omniscan 450 Compact Imaging Sonar Cerulean Omniscan 450 Compact er en lettvekts, sanntids bildesonar med full 360° dekning og skanner med opptil 20Hz ved korte rekkevidder. Den opererer ved en nominell frekvens på 450kHz og har en maksimal rekkevidde på 100 meter. Med en strålebredde på 1,1° og en vertikal strålehøyde på 15°, kan den fange opp fine detaljer samtidig som den forblir kompakt og lett å integrere med en ROV. Den egner seg godt til navigasjon i trange områder, objektdeteksjon og miljøovervåking.
Cerulean Omniscan 450SS Dette er en forbedret versjon av Compact-modellen. Omniscan 450 SS utvider rekkevidden til 150 meter og tilbyr en smalere strålebredde på bare 0,5°, som gir høyere presisjon over større avstander. Den opererer også ved 450kHz og har en strålehøyde på 50°. Med sanntidsskanning og kompakt design er denne sonaren ideell for inspeksjon av infrastruktur, målfølge og situasjonsforståelse på større dyp, med en dybdeklassifisering på 300 meter.
Profileringssonarer
831L Pipe Profiling Sonar 831L-sonaren er spesialdesignet for detaljerte inspeksjoner av rørinteriør og tunnel-lignende miljøer. Den opererer ved 2,25 MHz og gir en oppløsning ned til 0,5 mm, noe som muliggjør svært presise 2D-snitt eller 3D-rekonstruksjoner av interne strukturer. Med en minimumsrekkevidde på bare 50 mm og en dybdeklassifisering på 1000 meter, er sonaren spesielt godt egnet for kartlegging av trange områder og tilstandsvurdering i krevende industrielle omgivelser. Når den monteres på en nøytral oppdriftsplattform med ROV, opprettholder systemet god manøvreringsevne samtidig som det gir kraftige profileringsegenskaper.
Ekkolodd og høydemåler
Ping Sonar Echosounder & Altimeter Denne kompakte sonarmodulen gir nøyaktig avstandsmåling til havbunnen eller nærliggende objekter, og fungerer som både ekkolodd og høydemåler. Den opererer ved 115kHz med en strålebredde på 30°, og har en maksimal rekkevidde på 70 meter (typisk brukbar rekkevidde ca. 50 meter). Med en rekkeviddeoppløsning på 0,5 % av målt avstand hjelper den ROV-operatører med å holde stabil høyde, unngå kollisjoner og samle inn topografiske data i både grunt og dypere vann. Det lave strømforbruket og lette designet gjør den til en utmerket match for integrasjon med Blueye X3 ROV for generell navigasjon og høydeholdingsoppgaver.
Kilder:
Robert D. Christ og Robert L. Wernli Sr., The ROV Manual (2007), 2nd Edition.
Micron Gemini Tritech International Ltd
Ping 360 Sonar Blue Robotics
ISS360 Impact Subsea










