

Akustiske posisjoneringssystemer
Hydroakustiske posisjoneringssystemer brukes ofte til å bestemme posisjonen til et objekt under vann. Disse systemene består vanligvis av en transponder plassert på ROV-en og en toppenhet med en rekke transdusere for å oppdage lydsignalene.
Transponderen på ROV-en sender ut et karakteristisk ping med jevne mellomrom eller på forespørsel fra toppenheten. Toppenheten kan deretter bestemme hvilken retning og i hvilken avstand pingen kommer fra, og dermed lage et estimat av hvor ROV-en befinner seg.
Det finnes en rekke forskjellige systemer som vanligvis er kategorisert etter avstanden mellom transduserne. Vi skal nå gå nærmere inn på to av disse systemene.
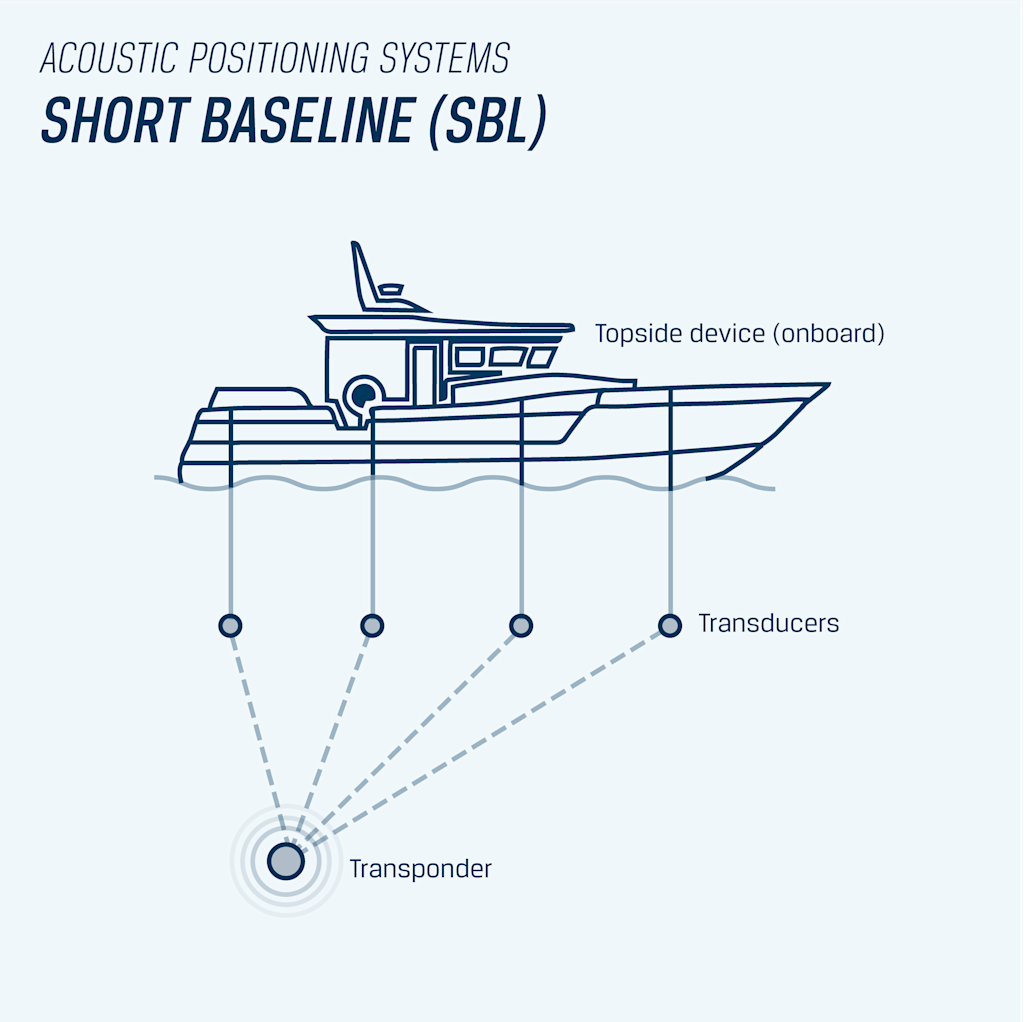
Short Baseline (SBL) Systemer: Akustiske posisjoneringssystemer med kort baseline består vanligvis av en enhet på overflaten med et sett av transdusere og en transponder som er montert på ROV-en. Transduserne kan monteres med avstand fra omtrent 50 cm til flere meter fra hverandre. Når transponderen sender ut et signal (ping), måles lydhastighet for hver mottaker. Siden hastigheten til lyd i vann er kjent (omtrent 1500 m/s), kan man beregne de fire avstandene og bruke trigonometri for å bestemme ROV-ens posisjon (i X- og Y-plan). Z-komponenten beregnes nøyaktig ved hjelp av en trykksensor. ROV-ens relative posisjon legges deretter til antennen's GPS-posisjon og roteres i henhold til kurs før den globale posisjonen (breddegrad, lengdegrad) sendes tilbake til ROV-en via kabelen.
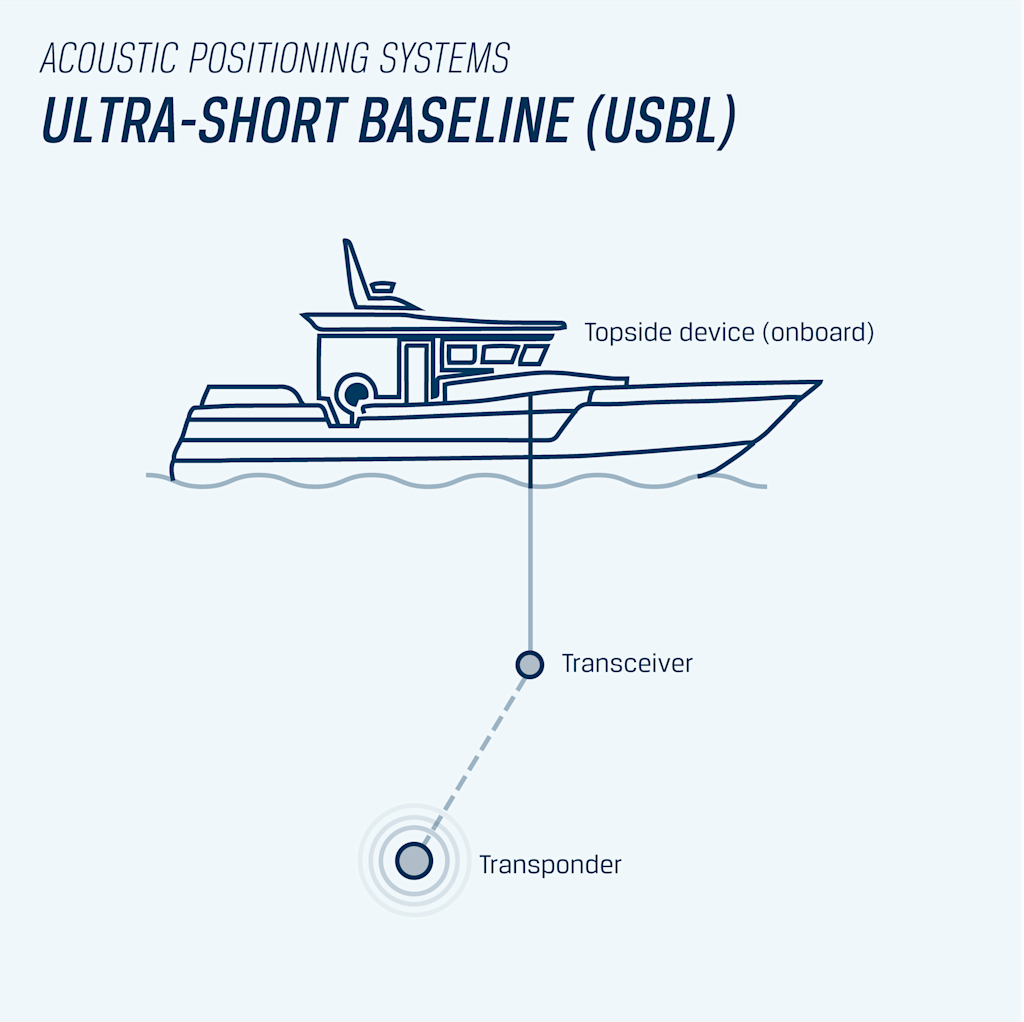
Ultra-Short baseline (USBL) systemer: Ultra-short baseline-systemer fungerer på en lignende måte som KBL-systemer, men i stedet for å ha fire individuelle transdusere, er de alle samlet i én enhet. USBLen består av et sett av transdusere som vanligvis er adskilt med 1-10 cm. Ved å bruke faseforskjell er det mulig å bestemme hvilken retning lyden kommer fra, og ved å måle flytiden, kan man estimere avstanden.
Hvorfor det kan være utfordrende å få en nøyaktig posisjon av det du sporer
Forestill deg at du er på en utendørs konsert med et fullt symfoniorkester. Å skille ut lyden fra ett bestemt instrument er en vanskelig oppgave. Du ville sannsynligvis anse forestillingen som litt "støyende." En symfonikonsert høres faktisk bedre ut i en innelukket sal. Det samme kan forestilles med akustiske posisjoneringssystemer under vann. I en travel havn er det utfordrende å plukke opp en posisjoneringsfakkel blant støyen av lyder under vann fra andre fartøyer og ekko fra havnens strukturer.
I havnesituasjonen vil vi få lydbølger som reflekteres fra en vegg eller havbunnen, noe som vil indikere en feil avstand og retning, noe som resulterer i en mer usikker posisjonsanslag. For å avhjelpe dette må avansert filtrering brukes. Dette filteret vil bare akseptere et signal med en trykkbølge av riktig frekvens som har en amplitude større enn en angitt terskel. Alle signaler må oppdage "pingen." "Pingen" må ha riktig frekvens og være høy nok til å høre (dvs. en signal-til-støy-forhold større enn 1).
Water Linked DVL A50
Water Linked DVL A50 er en sensor som gir hastighetsmålinger (fart og retning) ved å sende lydbølger mot havbunnen for så å analysere ekkoene. Forestill deg sirenen til en ambulanse. Du kan høre sirenen komme nærmere deg når ambulansen nærmer seg, og du kan høre endringen i tonehøyde når den kjører bort fra deg. Dette kalles "Doppler-effekten". DVL sender ut en rekke vanligvis fire sonarbølger nedover mot bunnen, der hver bølge peker i en annen retning. Ved å sammenligne tonehøyden til hver av lydbølgene, kan den estimere kjøretøyets hastighet i forhold til havbunnen. Med hastighetsmålingene er det mulig å få et posisjonsestimat ved hjelp av dead reconing (Kalman-filter), der alle tilgjengelige sensorer smeltes sammen for å oppnå den beste mulige posisjonsestimatet.
Bruk og fordeler med DVL
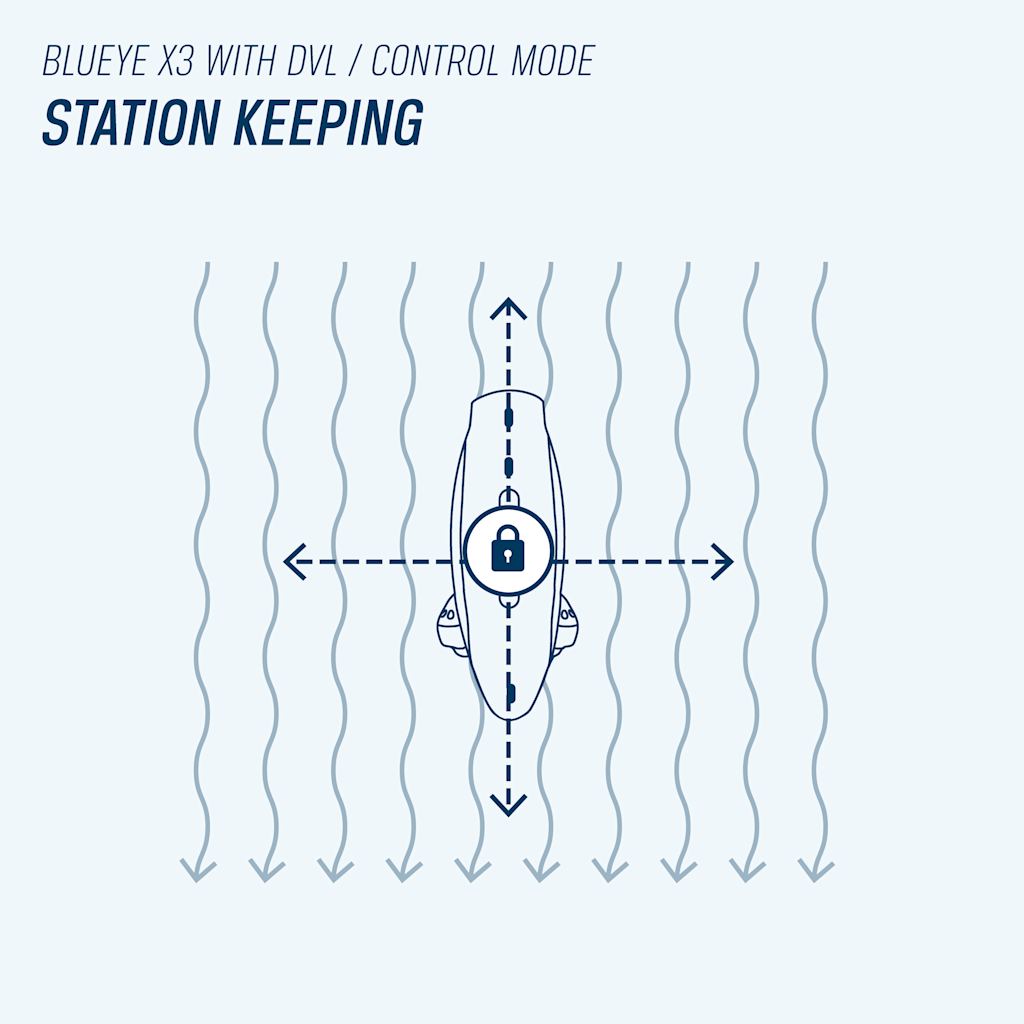
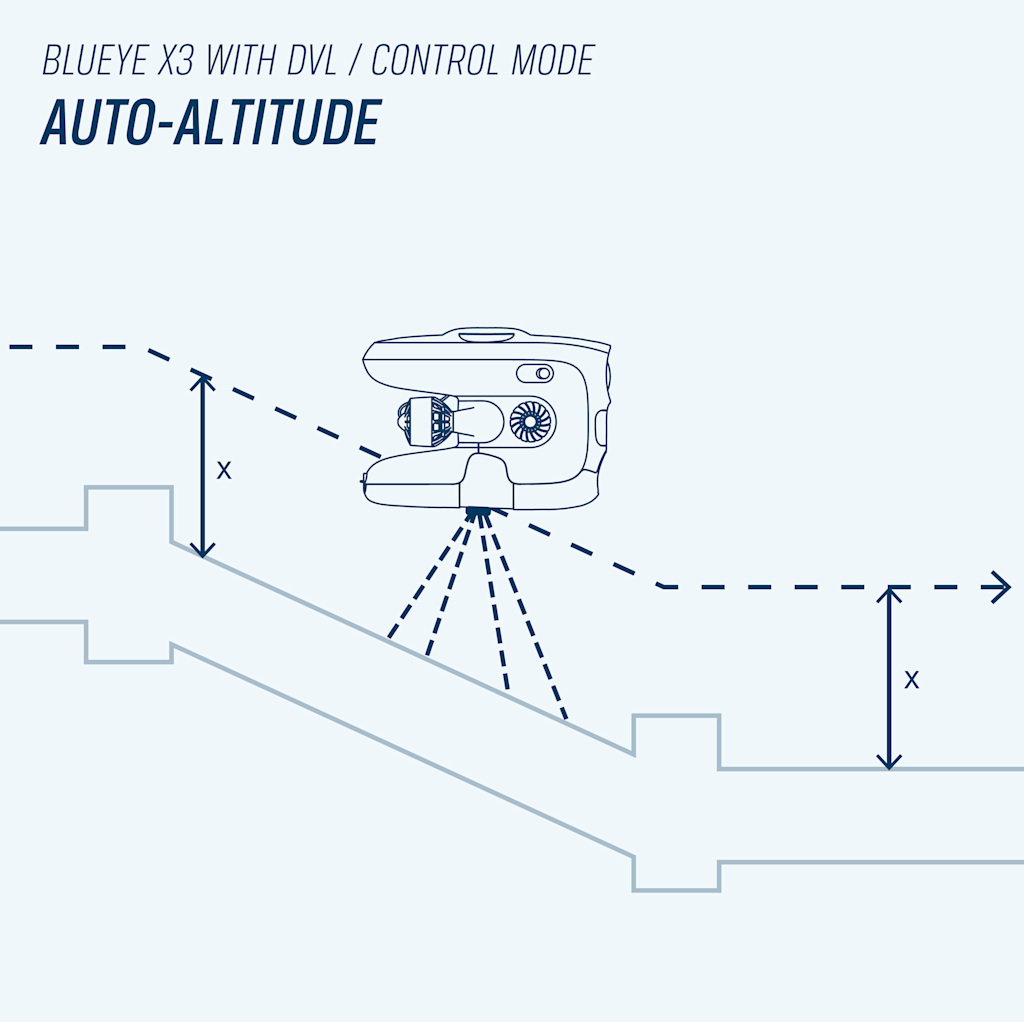
Med en DVL montert på Blueye ROV-en får du en ny kontrollmodus som kalles "station keeping". Denne funksjonen er utmerket for å opprettholde posisjonen i områder med strøm. Du får også automatisk høydekontroll, som lar deg opprettholde en konstant avstand fra havbunnen når du dykker ned til større dybder.
DVL gir et "dead reckoning"-spor som starter fra GPS-posisjonen til kontrollenheten din (eller et kjent interessepunkt) og bruker ROV-ens kompass (eller manuell retning) for å rotere sporet i forhold til nord. Dette fjerner behovet for synslinje mellom operatøren/overflateposisjonen og ROV-en.
DVL har spesielle fordeler i operasjoner som:
- Observasjonsoppgaver der ROV-en må vente på en hendelse som skal skje.
- Elver eller områder med høy strøm, der stationkeeping frigjør den mentale belastningen ved manuelt å kjempe mot strømmen. Dette øker kvaliteten på dataene som samles inn og sjansene for å lykkes med oppgaven. Når du slipper styrespakene, kan du enkelt ta en kort pause eller overlate kontrollen til noen ved siden av deg.
- Ikke-stasjonære operasjoner (for eksempel fra skip).
- Bruk av andre eksterne sensorer som trenger ekstra stabilitet for å måle riktig.
DVL er enkel å bruke og krever ingen ekstern utstyrsoppsett. Stationkeeping-funksjonen gjør en virkelig forskjell når det gjelder brukerens kontrollmuligheter på alle nivåer. Den vil også kreve mindre strømforbruk fra ROV-batteriet, siden sensoren har mer finjustert kontroll over thrust-inputene.
DVL gir høy presisjonsestimater, men potensielt lav nøyaktighet avhengig av den opprinnelige innfangede retningen. Siden DVL bruker dead reckoning for å lage et spor, vil posisjonsestimatene drifte over tid. Det anbefales å heve ROV-en til overflaten hvert 15-20 minutt og tilbakestille startpunktet for posisjonen for å minimere feilen i posisjonen (på grunn av akkumulert drift).
Sanntidsposisjon i overflaten med Blueye GPS
Når man inspiserer undervannsmiljøer er det avgjørende å vite nøyaktig posisjon. Med Blueye GPS kan du enkelt spore og logge posisjoner i sanntid, slik at du alltid vet hvor datamaterialet ble samlet inn. I tillegg kan du merke interessepunkter direkte i Blueye-appen, noe som gjør det enklere å organisere og finne tilbake til funnene. Blueye GPS er designet for å dokumentere undervannsfunn med presisjon og effektivisere arbeidsflyten - enten du kartlegger undervannsstrukturer, inspiserer havner eller overvåker marine økosystemer.
Kombiner Blueye GPS med en DVL
For operatører som krever høy presisjon kan Blueye GPS kombineres med WaterLinked DVL A50. I tillegg kan begge sensorene kombineres på én gjesteport, noe som frigjør plass for ekstra utstyr. Ved å bruke den nyeste kjente GPS-posisjonen som referanse, sikrer systemet nøyaktig posisjonering gjennom hele dykket. Når ROVen kommer opp til overflaten igjen, vil posisjonsdataene sømløst justeres tilbake til GPS-referansen, noe som minimerer avdrift og forbedrer operasjonell effektivitet.
Detaljert navigasjonsdata direkte i Blueye Appen
Sensorintegrasjonene med Blueye-programvaren gir operatøren nøyaktige posisjonsdata i Blueye Appen. Du finner detaljert navigasjonsdata og en kartvisning som viser ROV-ens sanntidsspor i navigasjonsmenyen.
En liste med interessepunkter kan importeres før dykket, noe som gjør det enklere å finne objektet av interesse. Du kan også legge til nye punkter mens du dykker. Flere kart er også tilgjengelige for bruk offline i områder uten mobiltilkobling.
Etterbehandling og dokumentasjon av data
En KML- eller KMZ-fil kan enkelt hentes fra dykkeloggen i Blueye Appen. Disse filene kan vises direkte på Google Earth eller andre GIS-verktøy. Bruk av posisjonsloggfilene vil betydelig forbedre arbeidsflyten din når du lager dykkerapporter i ettertid. De er også svært nyttige hvis du vil besøke interessepunkter på nytt eller utforske et område gradvis. Du kan laste spor fra ulike dykk inn i samme kart for å få en god visuell oversikt. Posisjonsdataene vil også være tilgjengelige som metadata i bildene du tar med ROV-en din.
Finn og last ned eksempelfiler nederst i denne artikkelen.
Få det beste fra begge verdener - kombiner USBL og DVL
Du kan kombinere en USBL og DVL med Blueye X3 ROV. Når de to sensorene er koblet til ROV-en, vil de automatisk inkluderes i observeralgoritmen og smeltes sammen for å skape et forbedret, ikke-driftende posisjonsestimat. DVL reduserer hoppene i posisjonsmålingene fra USBL, mens USBL retter opp den langsiktige driftingen til DVL.
Opplevelsen i Blueye Appen og i loggene vil være den samme, men med økt nøyaktighet og presisjon på posisjonsestimatet. De ekstra kontrollmodusene som DVL gir, vil også være enkelt tilgjengelige. Dette er en fantastisk kombinasjon!
Fremtidige utviklinger for posisjoneringssensorer
De sensorene som er nevnt i denne artikkelen, er bare et par av alternativene vi har utviklet integrasjoner for. Flere andre flotte sensorer er også kompatible med Blueye-systemet, og vi tester kontinuerlig hva som er tilgjengelig for å utvide tilbudet vårt. Noen andre passende sensorer som kan nevnes, er Kongsberg MicroPap USBL fra Kongsberg og Micro Ranger 2 fra Sonardyne.
Vi utvikler også kontinuerlig ny programvare i Blueye Appen, som gjør det mulig med nye funksjoner basert på inndata fra de ulike sensorene. Nye navigasjonsfunksjoner som "misjonsplanlegging," "tilbake til hjem," og "gå til dybde" vil bli tilgjengelige gjennom gratis programvareoppdateringer snart.
Eksempelfil for positionsdata i KMZ (Google Earth)
En eksempelfil for posisjonsdata i KMZ. Filen kan åpnes i Google Earth Pro.- Format
- application/zip
- File size
- 3.56 MB
Eksempelfil for posisjonsdata i KML
Eksempelfil for posisjonsdata som kan åpnes i Google My Maps, eller hvilket som helst annet GIS verktøy- Format
- application/vnd.google-earth.kml+xml
- File size
- 0.27 MB








