

Forberedelsene før oppdraget
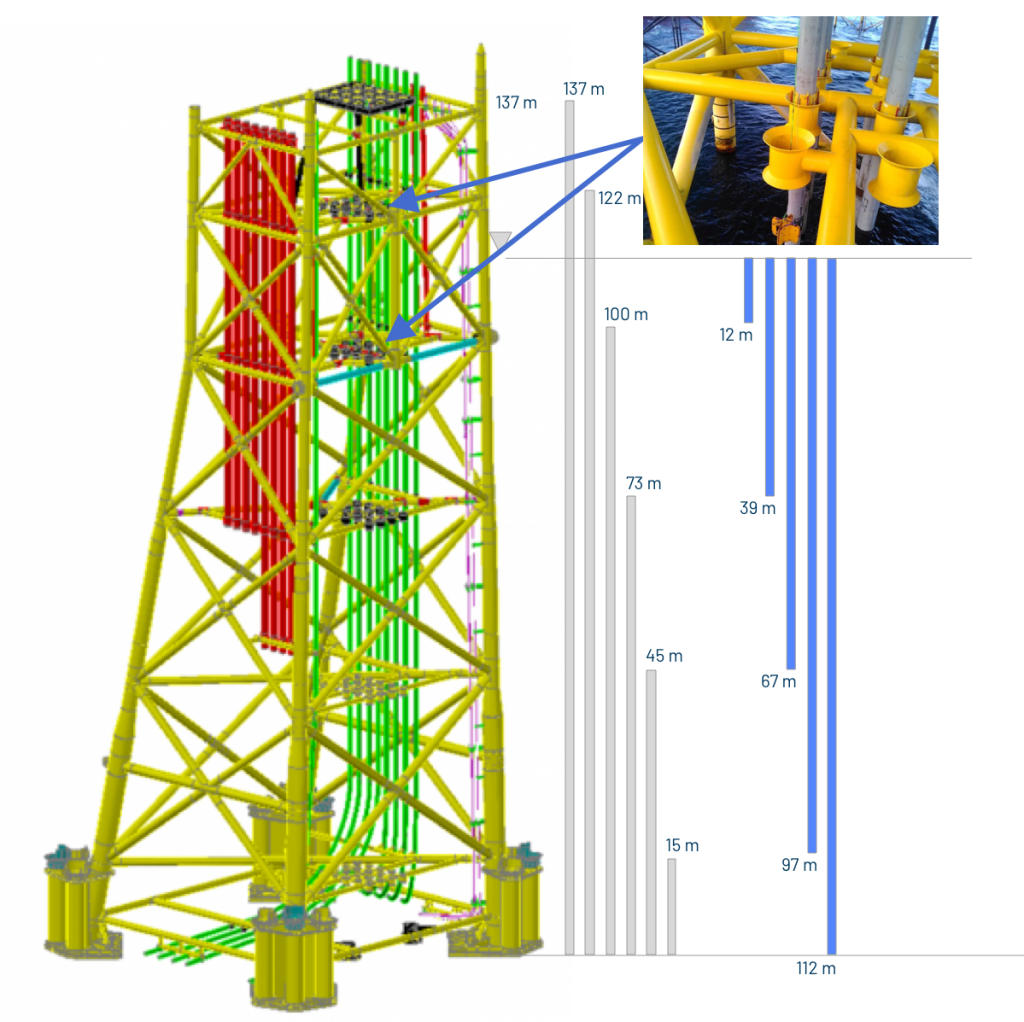
Oppdraget var i hovedsak å observere conductor-guidene når borestrengen og conductor-rørene skulle senkes ned igjennom jacket-konstruksjonen til Ivar Aasen. Dette er nødvendig for å forhindre skade på utstyret, som igjen kan føre til store forsinkelser i prosjektet. Oppdraget er også en del av Aker BP sitt insentiv til å kutte kostnader ved å muligens kunne redusere bruken av arbeids ROV-er i enkle marine operasjoner.
Været ble observert nøye med varsel for signifikant bølgehøyde og vindstyrke. Med en vindstyrke på omlag 10-15 m/s og bølger på 2-3 Hs så bestemte vi oss for å prøve å sette ut Blueye-dronen. For at det skulle være forsvarlig å senke den ned over rekka ble det laget en enkel utsettingsrigg bestående av en liten anker rulle montert på en kabelskinne som igjen er stripset fast til rekkverket.
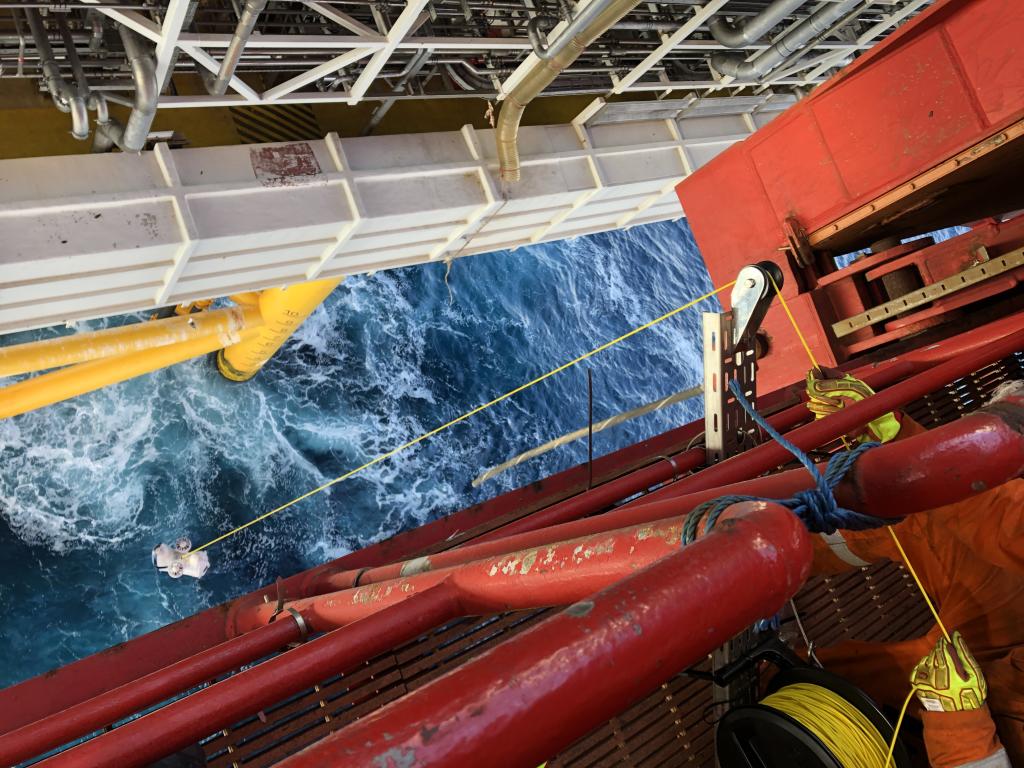
Dronen ble senket 38 meter ned fra Texas-deck før den traff vannet. Selv om vi på forhånd hadde fryktet at farkosten vil bli som en pendel var det helt uproblematisk å senke den ned til bølgene. Da mini-roven traff overflaten var det bare å gi ut nok på tetheren, holde inne boost knappen, og fly bort til Ivar Aasen strukturen i bølgene som brøt rundt fagverket. Med auto-heading var det heller ingen sak å holde retningen selv i dette bølgeskummet. Da vi kom ned på 12-15 meters dybde roet det seg betraktelig og vi fikk raskt øye på første nivået med conductor-guides.

Det var krystallklart vann med godt lys som gjorde det enkelt å orientere seg. Etter hvert som vi kom lengre ned ble den mørkere og mer gromsete, men det gikk også helt fint med dronens kraftige lys, så lenge vi holdt deler av strukturen i synsfeltet. Da det var mye strøm og krefter fra bølgene ble batteriet brukt opp relativt raskt, så vi endte opp en dykketid på ca 75 min etter å ha vært nede på den nederste conductor-guiden på 100 m dybde. Man kunne enkelt se borestrengen rotere mens vi kjørte opp til overflaten igjen. Til slutt dro vi inn slakken på tetheren før vi heiste den opp med håndkraft over ankerrulla.

ROV-gutta
Det var også en annen ROV som også var ganske liten men stadigvekk 6 ganger tyngre enn blueye-farkosten. De hadde rigget en kontainer på dekk med et mannskap på fire mann som gikk 12 timers skift. Begge gutta på dagskiftet hadde ellers lang erfaring som ROV piloter i Nordsjøen for selskaper som IKM Subsea og Oceaneering. Deres farkost var en Saab Seaeye Falcon utstyrt med både gripper og multi-beam sonar. I tillegg ble det montert en PH-sniffer (montert i front) da de skulle verifisere at betongen hadde kommet helt til topps rundt conductoren i hullet.

Han ene ROV piloten var også interessert i å teste Blueye dronen og fikk være med å sette ut dronen fra riggen. Etter en Work Permit og en toolbox-talk så var dronen i vannet. Han ble raskt veldig imponert over manøvrerbarheten og balansen i farkosten.
Dette er den beste mini-ROVen jeg noen gang har prøvd, og det sier jeg ikke bare for å være hyggelig!
- ROV Pilot for IKM Subsea
Videre likte han bildekvaliteten og hvor lite backscatter det var i bildet. Med bildestabiliseringen fikk vi tatt noen virkelig gode bilder med borestrengen som roterte rundt i conductor-guiden på 40 m. Boresjefen var også fornøyd med bildekvaliteten på sin videostrøm oppe i drillerbua, som var rutet opp via en midlertidig ethernet kabel.
Blueye dronen klarte oppdraget og kom helt til bunns på Ivar Aasen i Nordsjøen, selv om vi fortsatt var avhengig av enkelte funksjoner som "Bubble watch" og PH-måling fra Falcon-ROVen.
ROV-havari
Dagen etter hjemreisen fikk jeg en telefon fra riggen om at deres ROV hadde havarert og at det ikke var mulig å skaffe reservedeler før over helgen. Dermed ble Blueye plutselig hoved-ROVen på topphull nr 2. ROV-gutta fikk da montert opp launch riggen igjen, og satt ut Maersk Drilling sin egen blueye drone.
Kom dronen dere til nytte? Vi fikk tatt bilder av conductor-kjøringen slik som ønsket av kunde. Den fikk seg en god test med launch fra dekk i 2 m+ Hs, 0,5 knop strøm, 110 m vanndyp og ellers krevende forhold. Ganske imponerende selv uten posisjonering eller sonar.
- ROV Pilot for IKM Subsea

Senere da jeg kom tilbake på kontoret i Trondheim fikk jeg også god tilbakemelding fra Hanna i Aker BP:
Blueye dronen var en god støtte på topphull nr 2. Selv om vi ikke fikk sett alt vi ønsket pga. batterilevetiden, så fikk vi det vi trengte for å fortsette operasjonen.
- Hanna Tronstad, Assistant Drilling Superintendent Aker BP















